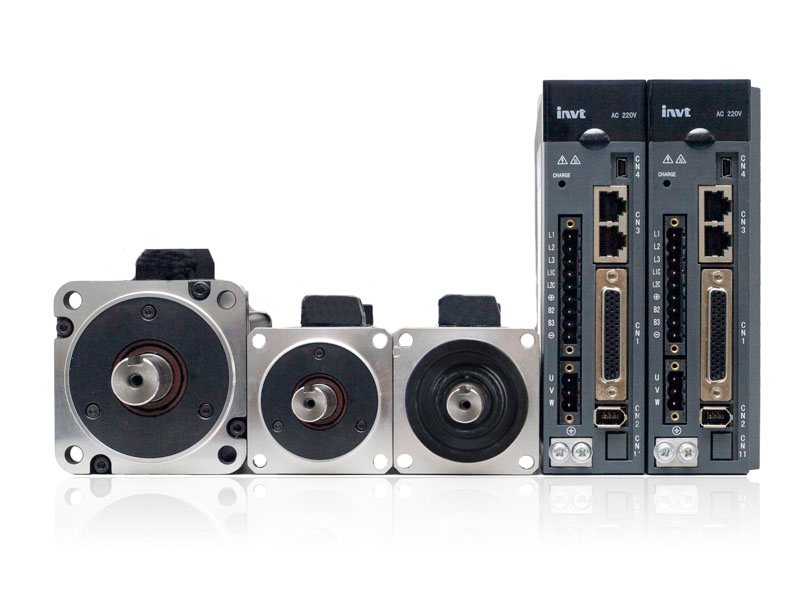
VS系列HMIDA200高性能通用交流伺服驅(qū)動(dòng)器
* 響應(yīng)頻率2.0kHz,高動(dòng)態(tài)響應(yīng),縮短整定時(shí)間,最大限度發(fā)揮高端機(jī)械性能;23位高精度編碼器,定位更精準(zhǔn),低速加工更平穩(wěn),加工表面更光潔;
* 內(nèi)部多點(diǎn)位位置,原點(diǎn)回歸,智能化增益調(diào)整及切換,控制隨心所欲;
* 速度觀測(cè)和負(fù)載慣量識(shí)別,大幅提高軌跡跟蹤精度;
* 全閉環(huán)抑振、低頻抑振、擾動(dòng)抑制、摩擦轉(zhuǎn)矩補(bǔ)償、自動(dòng)/手動(dòng)濾波陷波設(shè)置,高剛性,無(wú)微振:
* 電子凸輪、龍門(mén)同步精品應(yīng)用;
* 3倍過(guò)載能力,澎湃動(dòng)力;
* 支持旋轉(zhuǎn)電機(jī)、直線電機(jī)、第三方電機(jī);
* 支持PROFINET、EtherCAT、Modbus、CANopen高速工業(yè)總線;
* 功率:0.1kW-55kW
DA200系列伺服驅(qū)動(dòng)器(100W~55kW) | ||||
規(guī) 格 | 說(shuō) 明 | |||
電 源 | 220V系統(tǒng)輸入電壓 | 1P/3P AC 220V(-15%)~240V(+10%) 47Hz~63 Hz | ||
400V系統(tǒng)輸入電壓 | 3P AC 380V(-15%)~440V(+10%) 47Hz~63Hz | |||
端 口 | 控制信號(hào) | 輸入 | 標(biāo)準(zhǔn)型、脈沖型及CANopen總線型為10路輸入,EtherCAT總線型為7路輸入,PROFINET總線型為7路輸入(功能可通過(guò)相關(guān)參數(shù)配置) | |
輸出 | 標(biāo)準(zhǔn)型、脈沖型及CANopen總線型為6路輸出,EtherCAT總線型為4路輸出,PROFINET總線型為4路輸出(功能可通過(guò)相關(guān)參數(shù)配置) | |||
模擬量 | 輸入 | 標(biāo)準(zhǔn)型3路輸入(1路16bit、2路12bit模擬量輸入), 非標(biāo)準(zhǔn)型2路輸入(2路12bit模擬量輸入) | ||
輸出 | 2路輸出(模擬量監(jiān)視輸出) | |||
脈沖信號(hào) | 輸入 | 1路輸入(方式:差分或者集電極開(kāi)路) | ||
輸出 | 1路輸出(方式:差分輸出(A+, A-; B+, B-; Z+, Z-)或者集電極開(kāi)路輸出(A; B; Z)) | |||
第二編碼器 | 輸入 | 增量編碼器接口(第二編碼器或光柵尺) | ||
通信功能 | USB | 1:1通信上位機(jī)軟件(標(biāo)配) | ||
RS485 | 1:n通信(標(biāo)配) | |||
CANopen | 1:n通信(選配) | |||
PROFINET | 1:n通信(選配) | |||
PROFIdrive | 1:n通信(選配) | |||
EtherCAT | 1:n通信(選配) | |||
安全端子 | STO | Safe Torque Off (選配) | ||
控制模式 | 1、位置控制;2、速度控制;3、轉(zhuǎn)矩控制;4、位置/速度模式切換;5、速度/轉(zhuǎn)矩模式切換;6、位置/轉(zhuǎn)矩模式切換;7、全閉環(huán)控制;8、CANopen模式;9、EtherCAT模式 | |||
功 能 | 位置控制 | 控制輸入 | 1、滯留脈沖清零;2、指令脈沖輸入禁止;3、電子齒輪比切換;4、制振控制切換等 | |
控制輸出 | 定位完成輸出等 | |||
脈沖輸入 | 最大脈沖 輸入頻率 | 光電耦合:差分輸入4Mpps,集電極開(kāi)路輸入200kpps | ||
脈沖輸入方式 | 1、脈沖+方向;2、CW+CCW;3、正交編碼 | |||
電子齒輪 | 1/10000~1000倍 | |||
濾波器 | 1、指令平滑濾波器;2、FIR濾波器 | |||
模擬量輸入 | 轉(zhuǎn)矩限制 | 可單獨(dú)進(jìn)行順/逆時(shí)針?lè)较虻霓D(zhuǎn)矩限制 | ||
制振控制 | 能抑制5~200Hz的前端振動(dòng)及整機(jī)振動(dòng) | |||
脈沖輸出 | 1、可進(jìn)行編碼器分辨率以下的任意分頻設(shè)定;2、具有B相取反功能 | |||
功 能 | 速度控制 | 控制輸入 | 1、內(nèi)部指令速度選擇1;2、內(nèi)部指令速度選擇2;3、內(nèi)部指令速度選擇3;4、零速鉗位等 | |
控制輸出 | 速度到達(dá)等 | |||
模擬量輸入 | 速度指令輸入 | 可根據(jù)模擬量電壓DC±10V進(jìn)行相關(guān)設(shè)定后為速度指令輸入 | ||
轉(zhuǎn)矩限制輸入 | 可單獨(dú)進(jìn)行順/逆時(shí)針?lè)较虻霓D(zhuǎn)矩限制 | |||
內(nèi)部速度指令 | 可根據(jù)外部控制輸入進(jìn)行切換內(nèi)部8段速度 | |||
速度指令加減速調(diào)整 | 可單獨(dú)設(shè)定加減速時(shí)間,也可進(jìn)行S曲線加減速設(shè)定 | |||
零速鉗位 | 零速鉗位功能在速度模式下,可設(shè)定工作在速度模式或位置模式 | |||
速度指令濾波器 | 模擬量輸入速度指令的一次延時(shí)濾波器 | |||
速度指令零漂抑制 | 能對(duì)外圍干擾等進(jìn)行零漂抑制,精度0.3mV | |||
轉(zhuǎn)矩控制 | 控制輸入 | 零速鉗位輸入等 | ||
控制輸出 | 速度到達(dá)等 | |||
模擬量輸入 | 轉(zhuǎn)矩指令輸入 | 模擬量轉(zhuǎn)矩指令輸入,可根據(jù)模擬量電壓進(jìn)行增益和極性設(shè)定,精度4.88mV | ||
速度限制輸入 | 可進(jìn)行模擬量速度限制 | |||
速度限制 | 通過(guò)參數(shù)可設(shè)定速度限制 | |||
轉(zhuǎn)矩指令濾波器 | 模擬量輸入轉(zhuǎn)矩指令的一次延時(shí)濾波器 | |||
轉(zhuǎn)矩指令零漂抑制 | 能對(duì)外圍干擾等進(jìn)行零漂抑制,精度4.88mV | |||
內(nèi)部位置 規(guī)劃 | 規(guī)劃點(diǎn)數(shù) | 可進(jìn)行128點(diǎn)內(nèi)部位置規(guī)劃設(shè)定,可通信控制定位 | ||
路徑設(shè)定 | 1、位置;2、速度;3、加速時(shí)間;4、減速時(shí)間;5、停止定時(shí)器; | |||
原點(diǎn)回歸 | 1、LS信號(hào);2、Z相信號(hào);3、LS信號(hào)+Z相信號(hào);4、力矩限制信號(hào) | |||
保 護(hù) | 硬件保護(hù) | 過(guò)壓、欠壓、過(guò)流、過(guò)速、過(guò)載、過(guò)熱、制動(dòng)電阻過(guò)載、編碼器故障等 | ||
軟件保護(hù) | 存儲(chǔ)器故障、初始化故障、I/O分配異常、位置偏差過(guò)大等 | |||
保護(hù)及故障記錄 | 1、可記錄10個(gè)故障 | |||
環(huán) 境 | 溫度 | 工作溫度 | 0~45℃ | |
儲(chǔ)存溫度 | -20~80℃(不凍結(jié)) | |||
工作 / 儲(chǔ)存濕度 | ≤90%RH(無(wú)凝露) | |||
IP等級(jí) | IP20 | |||
海拔 | 海拔1000m以下 | |||
振動(dòng) | ≤5.88m/s2,10~60Hz(不允許工作在共振點(diǎn)) | |||
黃先生:13771875320
邵先生:15050199975